Teleoperation Robot, 2013-2014
Intel ISEF, Third Award - Engineering: Electrical and Mechanical
Thousands have lost their lives while trying to protect others during natural disasters and other hazardous conditions. The purpose of this engineering project was to design a wireless teleoperation robot that could act as a second-body avatar while keeping its pilot safe.
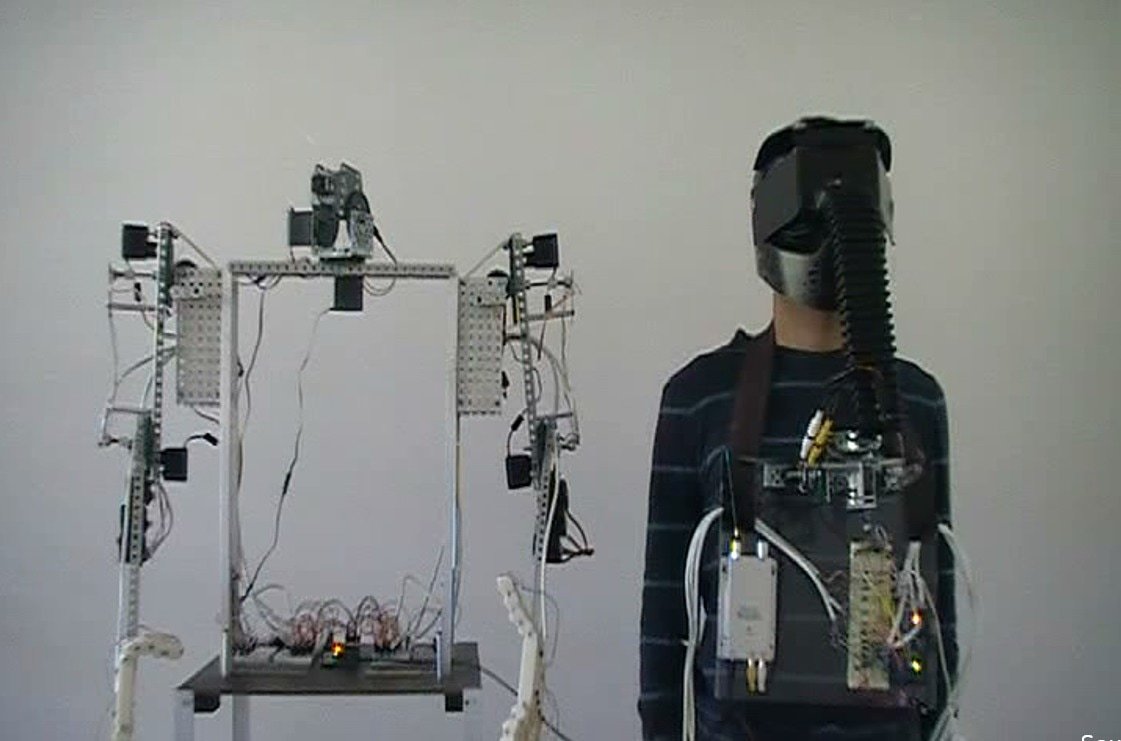
The robot was designed to copy a user's arm, hand, and head movements, while a mobile base handled variable terrain using vertical actuators. Teleoperation was achieved via potentiometers, accelerometers, and flex sensors arrayed on a suit worn by the user. To increase immersion, a visual system relayed the robot's camera feed to a head-mounted display, and a haptic system translated touches on the robot's fingers to physical feedback via solenoids on the user's hands. Both systems were wireless and battery powered.